Cámaras Automatización (3)
RTSP URL
Independientemente del software utilizado, es necesario especificar la dirección del vídeo RSTP para capturar la transmisión de vídeo de una cámara.
La URL RTSP debe tener como mínimo la dirección IP de la cámara y un formato. Por ejemplo: rtsp://192.168.14.2/avc
También puede incluir más opciones como esta: rtsp://192.168.14.2/avc/ch1&?cbr=0&quant=80&frate=30&gop=1
Formatos de vídeo
Cada modelo de cámara FLIR tiene diferentes formatos de vídeo: consulte el manual de usuario de la cámara para confirmar los formatos de vídeo disponibles en su cámara.

Parámetros de la URL
Los parámetros disponibles se enumeran a continuación. Estos parámetros no son válidos para el formato MJLS, ni para los modelos de cámara A3xx.
- {ch0|ch1} 0=IR(por defecto), 1=visible
- frate {velocidad de fotogramas en Hz}
- overlay {on|off}
- cbr {tasa de bits constante en bits por segundo, 0=tasa de bits variable}
- quant {nivel de calidad -1 a 100 donde 100 es la mejor calidad, válido solo si cbr=0}
- gop {grupo de imágenes, gop es la suma de un fotograma clave+fotogramas previstos, es decir, el número de fotogramas P que siguen a un fotograma I}
Instrucciones para utilizar VLC Media Player
Los siguientes ejemplos se han realizado con una FLIR AX8 y la versión 2.2.1 de VLC Player. Puede descargar el software de forma gratuita en https://www.videolan.org/.
Paso 1: Establecer la dirección IP de la cámara
Antes de poder conectarse a la cámara, debe configurar su dirección IP para que esté en la misma subred que su ordenador.
La mayoría de las cámaras en esta respuesta pueden ser cnfiguradas usando FLIR IP Config.
Consulte este enlace si no está familiarizado con las redes IP: Fundamentos de la dirección IP.
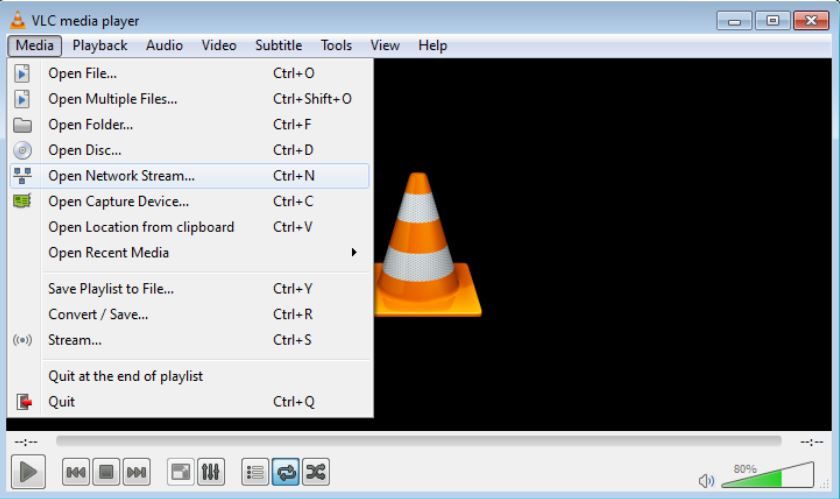
Paso 2: Configuración de la transmisión vídeo
Abre VLC Media Player, haz clic en la pestaña «Media» y luego en «Open Network Stream…».

Paso 3: Conectarse al flujo de la cámara
Con la dirección IP 169.254.79.239. El AX8 dispone de tres formatos de vídeo diferentes: AVC (h.264), MPEG4 y MJPEG. Este ejemplo muestra cómo conectarse al formato AVC. Escriba la dirección del flujo de vídeo (rtsp://169.254.79.239/avc) y haga clic en Play.

Se mostrará el vídeo.

Paso 4: Grabar un vídeo en directo
Los comandos de grabación aparecen en la pestaña Reproducción. Para grabar el vídeo, haga clic en Grabar. Para detener la grabación, haga clic en Detener.

Los vídeos grabados se guardan automáticamente en C:\Usuario\<su_usuario>\Videos. Puede acceder al vídeo yendo a la dirección de la carpeta o abriendo la carpeta Bibliotecas y luego abriendo Vídeos.
También hay otras formas de acceder al botón de grabación. Algunos ejemplos son:
Haciendo clic con el botón derecho del ratón en el vídeo.

Paso 5: Guardar la grabación en un archivo
Esto se consigue fácilmente con el reproductor multimedia VLC que se puede descargar desde aquí.
Una vez que VLC está instalado y la cámara está conectada al ordenador. Pulsa Media y haz clic en Open Network Stream…
Elija la pestaña Red e introduzca RTSP:\Ndirección IP de la cámara. A continuación, pulse Convertir en la barra de desplazamiento.

Busque la carpeta deseada y cree un archivo. Este es el archivo que contendrá su vídeo RTSP.


Ahora solo tienes que dejar que la cámara funcione y una vez que ya no desees grabar un vídeo, pulsa stop y el vídeo se guardará en tu disco duro.
Para cualquier duda o consulta, contacta con nosotros.
Monitor IR y configuración IP
FLIR IP Config se utiliza para determinar y establecer la dirección IP de las cámaras de red de FLIR, normalmente la serie FLIR A3xx, FLIR AX8 o las cámaras inteligentes FLIR A400/A700.
Hay versiones más antiguas de IP Config disponibles para aquellos que tienen problemas para ejecutar la versión 3.0 en su sistema. Consulte la página de descargas de software para obtener más detalles.
Haga clic para descargar la última versión de FLIR IP Config
Haga clic para descargar la última versión de FLIR IR Monitor
FLIR IR Monitor se puede utilizar para instalar y configurar las cámaras A310 y A300. Esta herramienta debe utilizarse solo para la configuración y no está pensada para la transmisión continua de vídeo.
Drivers
Cuando se utiliza la A310 en máquinas Windows, es necesario descargar los siguientes controladores:
Haga clic para descargar FLIR Streaming Drivers 32-bit
Haga clic para descargar FLIR Streaming Drivers 64-bit
Para cualquier duda o consulta, contacta con nosotros.
Como todo framework, Spinnaker tiene una curva de aprendizaje. Esta respuesta debería ayudarte con los fundamentos del uso del SDK para controlar la cámara y te indicará otros recursos más detallados sobre temas específicos.
Un gran primer recurso es nuestro conjunto de ejemplos de Spinnaker que se instalan junto con el SDK. Nuestros ejemplos se encuentran en:
- Windows: C:\Program Files\FLIR Systems\Spinnaker\src (o C:\Program Files\Point Grey Research\Spinnaker\src para Spinnaker 1.X)
- Linux: /opt/spinnaker/src (o /usr/src/spinnaker/src para las versiones 2.1 y anteriores)
- macOS: /Applications/Spinnaker/src
- Python: En la carpeta Examples de la descarga de PySpin
El ejemplo Acquisition es el mejor para empezar. Esta respuesta hará referencia al ejemplo de Acquisition en todo momento; se centrará en la versión de C++, pero se siguen los mismos pasos en otros lenguajes con pequeñas diferencias de sintaxis.
¿Cómo puedo acceder a mi cámara mediante la API?
Esto es bastante simple y es un patrón común en cualquier código de Spinnaker. Primero se obtiene una instancia del Sistema Spinnaker:
SystemPtr system = System::GetInstance();
A continuación, utilice este objeto de sistema para obtener una lista de todas las cámaras conectadas al sistema:
CameraList camList = system->GetCameras();
Por último, obtenga la cámara de la lista. La forma más sencilla de hacerlo es con el método GetByIndex:
CameraPtr pCam = camList.GetByIndex(i);
¿Cómo empiezo a transmitir la cámara y a tomar imágenes?
El código para conseguirlo también es sencillo, pero hay que tener en cuenta algunos conceptos importantes. Inicie la transmisión de la cámara con
pCam->BeginAcquisition();
Esto hace que la cámara comience a adquirir imágenes. Es importante tener en cuenta que en este punto, la cámara se ejecuta de forma asíncrona al código. En términos simples, después de que la cámara comience la adquisición, continuará capturando imágenes, incluso mientras el programa no esté haciendo nada. Una vez que la cámara captura una imagen, esta se transfiere automáticamente al PC y se almacena en la memoria RAM del mismo. El espacio asignado para almacenar esa imagen en la memoria se llama buffer. Un usuario solo puede interactuar con una imagen una vez que se ha recuperado del buffer con este método:
ImagePtr pResultImage = pCam->GetNextImage(1000);
La naturaleza asíncrona del sistema significa que GetNextImage debe llamarse aproximadamente con la misma frecuencia que la cámara captura una imagen para evitar que se pierdan fotogramas. Si no se llama a GetNextImage con la suficiente frecuencia, el búfer de la imagen puede llenarse y se pueden perder fotogramas.
¿Cómo puedo cambiar los ajustes de la cámara?
Esto se hace a través del nodemap de la cámara al que se puede acceder con
INodeMap& nodeMap = pCam->GetNodeMap();
Uso de Spinview para acelerar la depuración y el desarrollo
Spinview es un software GUI que se instala junto con Spinnaker. Aunque está diseñado como un software de demostración para mostrar las características de la cámara, esta GUI puede ser muy útil durante el desarrollo de aplicaciones. Con Spinview es muy fácil leer y escribir rápidamente en el nodemap de la cámara. Al comienzo del desarrollo, recomendamos utilizar Spinview para configurar la cámara de la forma deseada. Esto ayudará a visualizar las operaciones de nodo requeridas, así como a verificar que la cámara es capaz de operar de la manera deseada. Hay disponible una guía rápida de Spinview
Restablecimiento de las cámaras de visión artificial
Ocasionalmente, las cámaras pueden caer en un mal estado y necesitan ser recuperadas. La forma más fácil de recuperarse de esto es cargar la configuración por defecto de fábrica en la cámara cargando el conjunto de usuarios por defecto.
Para cualquier duda o consulta, contacta con nosotros.
Cámaras OEM (1)
FLIR Boson App es compatible con el funcionamiento de los núcleos Boson. La interfaz gráfica de usuario es un programa para PC que permite el mando y control remotos de muchas funciones y características de la cámara de uso común a través de una interfaz USB o UART a la cámara. Se incluyen los controladores. La interfaz gráfica de usuario Boson se puede descargar gratuitamente en https://www.flir.com/support-center/oem/camera-controller-gui-for-boson/. No se necesita una cámara para ejecutar la GUI y ver sus capacidades.
El kit de desarrollo de software (SDK) de Boson está disponible de forma gratuita. Proporciona una interfaz de mando y control, pero no da acceso a la transmisión de vídeo. La transmisión de vídeo por USB puede controlarse a través de una interfaz UVC estándar. La aplicación boson, webcamviewer, o la aplicación nativa de la cámara para Windows transmitirán vídeo.
La interfaz gráfica de usuario (GUI) del control de la cámara FLIR admite el funcionamiento de las cámaras Tau 2, Quark 2 y Photon heredadas. La GUI es un programa de PC que permite el comando y control remoto de muchas funciones y características de la cámara comúnmente utilizadas a través de una interfaz serial RS-232 a la cámara. Se incluyen controladores que permiten controlar la cámara Tau2 a través del protocolo USB. La GUI de control de la cámara está disponible como descarga gratuita en https://www.flir.com/support-center/oem/vue-camera-controller-gui/. No se necesita una cámara para ejecutar la GUI y ver sus capacidades. Los clientes que deseen desarrollar su propia interfaz personalizada para las cámaras Tau2, Quark2 y Photon heredadas pueden adquirir un kit de desarrollo de software (SDK). La información para pedir el SDK y otros accesorios de la cámara se puede encontrar en https://www.apliter.com/producto/sdk-para-para-flir-tau/
FLIR Boson App es compatible con el funcionamiento de los núcleos Boson. La interfaz gráfica de usuario es un programa para PC que permite el mando y control remotos de muchas funciones y características de la cámara de uso común a través de una interfaz USB o UART a la cámara. Se incluyen los controladores. La interfaz gráfica de usuario Boson se puede descargar gratuitamente en https://www.flir.com/support-center/oem/camera-controller-gui-for-boson/. No se necesita una cámara para ejecutar la GUI y ver sus capacidades.
El kit de desarrollo de software (SDK) de Boson está disponible de forma gratuita. Proporciona una interfaz de mando y control, pero no da acceso a la transmisión de vídeo. La transmisión de vídeo por USB puede controlarse a través de una interfaz UVC estándar. La aplicación boson, webcamviewer, o la aplicación nativa de la cámara para Windows transmitirán vídeo.
La interfaz gráfica de usuario (GUI) del control de la cámara FLIR admite el funcionamiento de las cámaras Tau 2, Quark 2 y Photon heredadas. La GUI es un programa de PC que permite el comando y control remoto de muchas funciones y características de la cámara comúnmente utilizadas a través de una interfaz serial RS-232 a la cámara. Se incluyen controladores que permiten controlar la cámara Tau2 a través del protocolo USB. La GUI de control de la cámara está disponible como descarga gratuita en https://www.flir.com/support-center/oem/vue-camera-controller-gui/. No se necesita una cámara para ejecutar la GUI y ver sus capacidades. Los clientes que deseen desarrollar su propia interfaz personalizada para las cámaras Tau2, Quark2 y Photon heredadas pueden adquirir un kit de desarrollo de software (SDK). La información para pedir el SDK y otros accesorios de la cámara se puede encontrar en https://www.apliter.com/producto/sdk-para-para-flir-tau/
Para cualquier duda o consulta, contacta con nosotros.
Cámaras Portátiles (2)
Dependiendo de la configuración de su cámara IR, puede conectar la cámara a una red de área local inalámbrica mediante Wi-Fi (Conectar a la red), o dejar que la cámara proporcione un punto de acceso Wi-Fi (Compartir) a otro dispositivo. Puede conectar la cámara de dos maneras diferentes.
El uso más común:
Configurar la cámara como punto de acceso Wi-Fi (Compartir). Este método se utiliza con un dispositivo iOS (iPhone o iPad).
Uso menos común:
Conectar la cámara a una WLAN (Conectar a la red). Este método se utiliza con un dispositivo Android.
Cómo conectar la cámara IR a un dispositivo iOS (iPhone, iPad):
1. Pulse el centro del panel de navegación para mostrar el sistema de menús.
2. Seleccione «Configuración» y pulse en el centro del panel de navegación. Aparecerá el menú Configuración.
3. Utilice el botón de navegación para seleccionar Conexiones > Wi-Fi.
4. Seleccione Compartir y pulse en el centro del panel de navegación.
5. (Paso opcional.) Para mostrar y cambiar los parámetros, seleccione Compartir y pulse en el centro del panel de navegación.
- Para cambiar el SSID, seleccione Nombre de red (SSID) y pulse en el centro del panel de navegación.
- Para cambiar la contraseña WPA2, seleccione Contraseña y pulse en el centro del panel de navegación.
Cómo conectar la cámara IR a un dispositivo Android:
- Pulse el centro del panel de navegación para mostrar el sistema de menús.
2. Seleccione «Configuración» y pulse en el centro del panel de navegación. Aparecerá el menú Configuración.
3. Utilice el botón de navegación para seleccionar Conexiones > Wi-Fi.
4. Seleccione Conectar a la red y pulse en el centro del panel de navegación.
5. Para mostrar una lista de las redes disponibles, seleccione Redes disponibles pulsando en el centro del panel de navegación.
6. Seleccione una de las redes disponibles y pulse en el centro del panel de navegación.
Una vez completados estos pasos, puede utilizar FLIR Tools Mobile en sus dispositivos para iniciar la conexión.
FLIR Tools Mobile puede descargarse desde la App Store para un iPhone o iPad y desde la Google Play Store para dispositivos Android.
Para cualquier duda o consulta, contacta con nosotros.
Para que FLIR ONE para Android funcione con un teléfono Android, debe tener en cuenta lo siguiente:
- La versión de Android debe ser 5.0 o superior. Puede encontrar una lista de dispositivos compatibles aquí.
- Su teléfono debe ser compatible con USB OTG (On The Go). OTG es un protocolo en el que el USB permite que las tabletas o los teléfonos inteligentes actúen como anfitriones, de modo que se puedan reconocer otros dispositivos USB como memorias USB, cámaras digitales, ratones o teclados. Para comprobar que su teléfono es compatible con OTG, póngase en contacto con el fabricante del mismo.
Dependiendo de su teléfono y de la versión de FLIR ONE que tenga, sus conexiones pueden ser diferentes y podría ser necesario un adaptador. Compruebe lo siguiente.
Teléfonos con conector Micro-USB
Si su teléfono tiene un puerto Micro-USB y su FLIR ONE tiene un conector diferente, entonces necesita un adaptador para que la cámara encaje en el teléfono. Se puede utilizar cualquiera de las marcas disponibles en el mercado, pero el adaptador debe ser compatible con OTG.
Teléfonos con conector USB tipo C

Si su teléfono tiene una toma USB de tipo C y su FLIR ONE tiene un conector Micro-USB, necesita un adaptador. Se puede utilizar cualquiera de las marcas disponibles en el mercado, pero el adaptador debe ser compatible con OTG.
Aclaración: los adaptadores que no son de la marca del fabricante no han sido probados directamente por FLIR. Si tiene preguntas, por favor haga una pregunta para contactar con uno de nuestros especialistas de producto.
Para cualquier duda o consulta, contacta con nosotros.
Cámaras Termográficas OGI - Optical Gas Imaging (Visualización de Gases) (1)
QOGI significa Quantitative Optical Gas Imaging (Imágenes Ópticas Cuantitativas de Gases) y es la tecnología más reciente relacionada con la detección y reparación de fugas (LDAR – Leaking Detection And Repair). QOGI utiliza las cámaras OGI existentes de FLIR (la GF320, la GFx320 y la GF620) para cuantificar las fugas de gas de hidrocarburos.
Soluciones FLIR QOGI
La FLIR QL320 es la última de las plataformas que ejecuta el avanzado método QOGI para cuantificar fácilmente las fugas de gas en unidades de tasa de fuga másica, tasa de fuga volumétrica o por longitud de concentración.
Triángulo QOGI
Para obtener una imagen cuantificable de un gas con una cámara de infrarrojos se necesitan tres cosas. Lo describimos como el «triángulo QOGI», similar al «triángulo del fuego», en el que se necesita combustible, oxígeno e ignición. A continuación se indican estos requisitos:
- α(λ): El gas tiene un pico de absorción IR que se solapa con filtro espectral de la cámara OGI
- ΔT: Hay un diferencial de temperatura suficiente entre la pluma de gas y el fondo
- CL: Existe una concentración suficiente de gas en la pluma

Para cualquier duda o consulta, contacta con nosotros.
Drones (1)
¿CUÁL ES LA DIFERENCIA ENTRE 30 HZ Y 9 HZ?
Las cámaras de vídeo emiten una serie de imágenes «fijas» a un ritmo regular, un ritmo dado en hercios (Hz) o en fotogramas por segundo (fps). Las cámaras UAS de FLIR con vídeo de 25 a 60 fps emiten ese número de fotogramas únicos por segundo. Para facilitar el transporte de las cámaras a través de las fronteras, existe una clase de cámaras «<9 Hz». Estas cámaras envían fotogramas de vídeo a una velocidad normal, pero estos fotogramas se duplican durante intervalos cortos. El resultado es una frecuencia de imagen efectiva inferior a 9 fps. Póngase en contacto con un especialista en exportación antes de transportar cualquier cámara térmica de un país a otro.
¿PUEDO EXPORTAR O VIAJAR INTERNACIONALMENTE CON MI CÁMARA TÉRMICA?
Existen normativas internacionales sobre el transporte y el traslado de todas las cámaras térmicas. Las leyes de exportación permiten que las cámaras térmicas con frecuencias de imagen inferiores a 9 fotogramas por segundo (fps) se muevan más libremente a través de las fronteras que las cámaras de 60 o 30 fps. Póngase en contacto con un especialista en exportación para obtener más detalles.
¿CUÁL ES LA DIFERENCIA ENTRE LAS CÁMARAS DE RESOLUCIÓN 160 × 120, 336 × 256 Y 640 × 512?
Cada cámara térmica para UAS de FLIR tiene un dispositivo de imagen conocido como plano focal que convierte la imagen del objetivo en píxeles. Los tamaños 160 × 120, 336 × 256 y 640 × 512 son ejemplos de las opciones de resolución disponibles para estas cámaras. El primer valor representa el número de píxeles horizontales y el segundo número representa el número de píxeles verticales. A primera vista, mucha gente asume que la 640 tiene el doble de resolución que la 336, pero en realidad el número total de píxeles es 3,8 veces mayor. El 336 × 256 ofrece 86.016 píxeles totales y el 640 × 512 ofrece 327.680 píxeles.
¿QUÉ ES EL CAMPO DE VISIÓN?
El campo de visión, también denominado FOV, es el grado de visibilidad que el objetivo de la cámara proporciona al sensor. Por ejemplo, cada píxel en la configuración de 640 × 512, 13 mm (FOV de 45 × 37 grados) representará un ángulo de 0,07 grados por píxel, lo que significa que a 30,5m, cada píxel está imaginando 4 cm. Desde un punto de vista menos técnico, el FOV equivale a la zona observable que se puede fotografiar con el objetivo. Los gráficos siguientes muestran cómo varios FOVs en cámaras de 640 y 256 corresponden al área observable cuando se mira hacia abajo. El cálculo es lineal, por lo que una elevación de 60 metros duplicaría el valor, mientras que una elevación de 50 pies sería la mitad del valor.

¿CUÁL ES EL MEJOR OBJETIVO PARA MI CASO?
Hay dos consideraciones principales para determinar el mejor objetivo y la mejor resolución para una aplicación determinada. En primer lugar, el campo de visión (FOV) es el ángulo aproximado de la imagen observable. La figura 2 muestra el área observable por modelo de lente a 30,5 metros (100ft) AGL suponiendo que usted está mirando directamente hacia abajo.

El segundo factor es el ángulo que representa cada píxel, conocido como iFOV. Conocer el ángulo de cada píxel ayuda a calcular el número de píxeles que aparecerían para varios objetivos a distintas distancias. Para la medición de la temperatura, un objeto debe aparecer como mínimo en una cuadrícula de 5 × 5 píxeles, pero 10 × 10 o más darán resultados aún mejores. El objetivo debe elegirse de forma que el FOV sea lo suficientemente amplio como para encontrar lo que se busca, y que el iFOV permita suficientes «píxeles en el objetivo» a la altitud de vuelo deseada.
La figura 2 muestra el tamaño del punto a 30,5 metros AGL cuando se mira hacia abajo. A nivel mundial, la opción de 640 × 512, 13 mm es el modelo número 1 en ventas y realiza muy bien la mayoría de las tareas.
*AGL (Above Ground Level) = Sobre el nivel del suelo
¿QUÉ DEBO COMPRAR?
Los sistemas de cámaras suelen estar disponibles como un paquete con un dron compatible. Esta es la forma más fácil de asegurar la compatibilidad. Hay paquetes de gimbal disponibles que se dirigen a cámaras específicas en drones específicos o familias de drones. Pueden estar disponibles a través del fabricante del vehículo o de terceros. La documentación de cada estabilizador identificará las cámaras y los vehículos con los que es compatible.
Para integrar una cámara sUAS de uso general en su dron actual, hay que tener en cuenta una serie de factores.
Peso y centro de gravedad (CG): El dron debe ser capaz de levantar la cámara y seguir manteniendo un tiempo de vuelo útil. Es necesario tomar algunas medidas para soportar la cámara en el vehículo y mantener el equilibrio. Las cámaras de los UAS de FLIR suelen tener un orificio roscado de ¼-20 en la parte superior, inferior o en ambos lados de la cámara. Estos agujeros son del mismo tamaño y patrón de rosca que se encuentran en las cámaras de consumo, por lo que pueden utilizarse en trípodes.
Alimentación eléctrica: La mayoría de las cámaras FLIR están diseñadas para obtener energía directamente de la batería del vehículo, mientras que otras obtienen 5 voltios regulados de un circuito de eliminación de la batería (BEC). Los requisitos de voltaje y corriente de cada cámara se pueden encontrar en la hoja de datos o en la guía del usuario de la cámara.
Vídeo: La cámara puede disponer de salidas de vídeo HDMI o compuesto. Si se necesita vídeo en tiempo real para su misión, debe proporcionarse un sistema de enlace descendente de vídeo compatible.
Control de la cámara y del estabilizador: Habrá que controlar varias características de la cámara y cualquier gimbal asociado. A menudo, esto se hace mediante señales servo PWM. Se trata de salidas de tres pines del controlador de vuelo o del receptor de control remoto que se utilizan para controlar los controladores de motor, los servoactuadores y otros componentes del vehículo.
GPS: Algunas cámaras tienen receptores GPS incorporados para geoetiquetar los archivos de imagen. Es posible que estos receptores deban conectarse a antenas externas, que suelen colocarse en la parte superior del vehículo para obtener la mejor recepción posible de los satélites. Algunas cámaras no tienen receptores GPS internos, y si los archivos de imagen van a ser geoetiquetados, la información del GPS del vehículo tendrá que ser enviada a la cámara. Normalmente, esto se hará utilizando MAVLink. La hoja de datos de ingeniería o la guía del usuario enumerarán las interfaces disponibles y sus capacidades.
¿PUEDO DETECTAR FUGAS DE GAS METANO CON MI CÁMARA TÉRMICA?
Las cámaras IR de detección de gas funcionan detectando la absorción de luz o energía térmica por parte de los gases. Esta absorción suele ser débil y en un espectro estrecho, por lo que se necesitan filtros ópticos especializados y sensores de alta calidad. Las cámaras térmicas de uso general no detectan estos gases de forma fiable. Las cámaras de detección de gases están especialmente diseñadas con filtros ópticos estrechos y suelen contener un refrigerador criogénico, que consume energía adicional y añade peso. Hecha un vistazo a las cámaras de detección de gases aquí: Cámaras OGI.
¿A QUÉ ALTURA PUEDO VOLAR CON MI CÁMARA TÉRMICA?
La altitud máxima permitida se encuentra en las especificaciones medioambientales de la hoja de datos del producto.
Aunque normalmente es de 11.500 metros MSL para la mayoría de los productos, los vehículos UAS deben ser operados de acuerdo con las leyes aplicables. Además, la resolución de la cámara impone limitaciones prácticas a las altitudes útiles. A una altitud de120 metros, un píxel en una cámara VUE Pro R con una lente de 13 mm representaría un área de más de 6 centímetros de ancho. Para la mayoría de las aplicaciones de imágenes térmicas, el objetivo tendría que estar mucho más cerca para proporcionar suficientes píxeles en el objetivo para que la imagen sea útil, o se debe utilizar una cámara con una lente diferente. Por ejemplo, a la misma altura de 400 pies (120 metros) y con un objetivo de 25 mm, un píxel representaría un área de ~3,4 pulgadas (8.6 cm) de diámetro. Para medir la temperatura, un objeto debe aparecer como mínimo como un objeto de 5 × 5 píxeles en la imagen. Con 10 × 10 se obtienen resultados aún mejores.
* MSL (Mean Sea Level) = Sobre el nivel del mar
¿HASTA DÓNDE PUEDO VER EN FUNCIÓN DEL OBJETIVO ELEGIDO?
No existe un límite práctico para la distancia que puede ver una cámara térmica a través de una línea de visión clara, pero es importante entender lo que se está viendo. La luna suele ser visible cuando no está oculta por las nubes (el vapor de agua absorbe la energía IR). Vista desde la Tierra, la luna subtiende un ángulo de unos 0,5 grados, por lo que en una cámara de 25 grados de FOV y 640 de resolución, la luna aparecería como un círculo de unos 12 píxeles de ancho.
El límite normal para la distancia del objetivo de una cámara IR es el tamaño en píxeles que el objeto aparecerá en la imagen y el número de píxeles que se requieren para identificar o extraer la información necesaria sobre el objetivo. Por ejemplo, como se muestra en la imagen, ¿desea detectar, reconocer o identificar a la persona en la imagen? El número de píxeles que coloca sobre un elemento le permite tomar la determinación. Para medir la temperatura, un objeto debe aparecer como mínimo como un objeto de 5 × 5 píxeles en la imagen. Con 10 × 10 se obtienen resultados aún mejores.

¿PUEDO CREAR ORTOMOSAICOS 3D CON MIS CONJUNTOS DE DATOS TÉRMICOS?
FLIR no ofrece actualmente herramientas para crear ortomosaicos térmicos. Para las operaciones de cartografía, existen servicios de ortomosaicos térmicos de terceros con experiencia en el procesamiento de imágenes de cámaras térmicas. Actualmente, la capacidad de conservar los datos de temperatura radiométrica a nivel de píxel se pierde en el proceso de creación del ortomosaico.
¿QUÉ SOFTWARE ES EL MEJOR PARA MI CONJUNTO DE DATOS TÉRMICOS O MI OPERACIÓN?
Las distintas cámaras ofrecen diferentes tipos de archivos y características. Además, las distintas aplicaciones tienen requisitos diferentes. Las cámaras térmicas de mayor resolución (320 × 256 o más) pueden lograr un mejor nivel de detalle guardando las imágenes en el formato -R.JPEG y procesándolas con la aplicación gratuita FLIR Thermal Studio Starter. Esta combinación permite ajustar los parámetros radiométricos después del vuelo y proporciona un marco sencillo para generar informes. También se pueden crear archivos CSV de los valores de los píxeles para un procesamiento adicional. FLIR Thermal Studio ofrece procesamiento por lotes para trabajos que requieren un gran número de archivos.
¿QUÉ ESTABILIZADOR DEBO UTILIZAR PARA MI VUE PRO R?
FLIR no tiene recomendaciones específicas para los Gimbals. Los proveedores de estabilizadores de terceros tendrán información sobre la compatibilidad de sus productos.
¿CÓMO OBTENGO TRANSMISIÓN DE VÍDEO DE MI CÁMARA?
Para la transmisión de vídeo en tiempo real, las cámaras UAS de FLIR proporcionan vídeo compuesto NTSC/PAL o HDMI. Compruebe las hojas de datos de la cámara para ver qué formatos de salida de vídeo son compatibles con los sistemas de enlace descendente de terceros.
¿QUÉ ES LA RADIOMETRÍA, LA NECESITO?
La radiometría es la medición de la cantidad de radiación procedente de un objetivo, normalmente en términos de temperatura del mismo. Esta función no siempre es necesaria para una aplicación determinada. La radiometría solo está disponible en las cámaras térmicas de alta calidad. Las imágenes térmicas suelen proporcionar información que el usuario puede interpretar fácilmente. Por ejemplo, cuando un panel solar parece notablemente más frío que sus vecinos o tiene una temperatura más desigual que sus vecinos, no es necesario conocer la magnitud de la diferencia en grados: hay que comprobar ese panel solar. Del mismo modo, cuando un vehículo muestra los frenos calientes y el motor caliente, mientras que otros no lo hacen, está claro qué vehículo fue el último en circular sin necesidad de conocer las temperaturas reales. Cuando se ve a una persona sospechosa escondida entre la vegetación, no es necesario conocer su temperatura corporal. Muchas aplicaciones de imágenes térmicas pueden realizarse de este modo sin necesidad de medir la temperatura absoluta. En algunos casos, es necesario realizar una medición absoluta. Por ejemplo, al comprobar un transformador en un poste de electricidad, puede que no haya transformadores cercanos para comparar. Para aplicaciones como esta, se utilizaría una cámara radiométrica, y la temperatura superficial estimada se compararía con los límites establecidos.
¿QUÉ PALETA DE COLORES ES LA MEJOR PARA MI TRABAJO?
Muchos usuarios de cámaras térmicas en laboratorios o en el ejército utilizan la paleta en blanco y negro (White Hot/Black Hot). Las paletas de colores exageradas pueden utilizarse para resaltar los cambios de temperatura que, de otro modo, podrían ser difíciles de ver, pero hacen aparecer ruido adicional y pueden enmascarar información clave. Las paletas de colores deben ser elegidas para mostrar los detalles pertinentes de una imagen sin distracción. Si se utiliza el formato de archivo de imagen radiométrica R.JPEG de FLIR, la paleta de colores puede cambiarse después de un vuelo utilizando la aplicación gratuita de FLIR Thermal Studio o las versión Pro.
¿CUÁNDO DEBO UTILIZAR LAS ISOTERMAS?
La función de la isoterma destaca un rango de temperaturas con un cambio de color. Esto puede facilitar la búsqueda de objetos de una temperatura conocida contra un fondo de una temperatura diferente o para resaltar las áreas de un campo que han superado una determinada temperatura. La isoterma solo se ofrece en las cámaras radiométricas. La precisión de la función de isoterma es la misma que la de la medición de la temperatura.
¿QUÉ PRECISIÓN TIENE LA LECTURA DE LA TEMPERATURA?
Hay dos elementos a tener en cuenta en relación con la temperatura: la sensibilidad térmica y la precisión de la medición. La sensibilidad térmica es la capacidad de la cámara para detectar diferencias de temperatura. La mayoría de los sensores IR no refrigerados en las operaciones de los UAS tienen una sensibilidad térmica de <50 mK.
La precisión de la medición de la temperatura varía en función del rango seleccionado. Por ejemplo:
+/- 5 °C o el 5% de las lecturas en el rango de -25 °C a +135 °C
+/- 20 °C o el 20% de las lecturas en el rango de -40 °C a +550 °C
Los parámetros radiométricos son detalles ambientales que afectan a la cantidad de radiación térmica emitida por un objeto o que afectan a la cantidad de radiación que llega a la cámara. Por ejemplo, para una temperatura superficial determinada, un objeto con una emisividad del 48% emitirá la mitad de la radiación térmica que emite un objeto con una emisividad del 96%. Los objetos con menor emisividad también reflejarán más radiación térmica de su entorno. Por esta razón, la emisividad y la temperatura de fondo deben ser conocidas y consideradas para una estimación precisa de la temperatura de un objeto. Las distancias largas o las atenuaciones atmosféricas afectarán a la cantidad de radiación térmica que la cámara recibirá de un objeto. Estos parámetros pueden ajustarse en la cámara para su visualización en tiempo real. Si se utiliza el formato de archivo de imagen radiométrica R.JPEG de FLIR, estos parámetros pueden ajustarse posteriormente mediante la aplicación gratuita FLIR Tools o FLIR Thermal Studio Pro.
¿NECESITO UNA FORMACIÓN ESPECIAL PARA MANEJAR UNA CÁMARA TÉRMICA?
Para muchos usos de las cámaras térmicas, la información que se presenta es tan intuitiva que se necesita poca o ninguna formación para obtener resultados. Hay vídeos gratuitos en FLIR Delta y otras páginas web de FLIR que pueden utilizarse para empezar. Los operadores con más experiencia sacarán aún más partido a las imágenes térmicas. Algunas aplicaciones requieren una formación y una certificación formales para una recopilación e interpretación rápida y coherente de los datos térmicos. En Apliter Termografía ofrecemos servicios completos de formación y certificación del Infrared Training Center. Consulta esta página para ver los cursos que ofrecemos: https://itc.apliter.com/
¿CUÁL ES EL RANGO DE TEMPERATURA MÍNIMO Y MÁXIMO DE LA CÁMARA?
Las especificaciones de la cámara figuran en la hoja de datos de cada producto. La VUE Pro R puede medir con fiabilidad temperaturas de -25 °C a 135 °C, pero también puede detectar objetivos de -40 °C a 550 °C con una precisión y sensibilidad reducidas. Los objetos fuera de estos rangos aparecerán como regiones sólidas, claras u oscuras, sin detalles en la superficie.
¿SE GEOETIQUETAN AUTOMÁTICAMENTE MIS IMÁGENES TÉRMICAS?
Si la cámara dispone de datos GPS, las imágenes almacenadas en el formato radiométrico R.JPEG de FLIR serán geoetiquetadas. Las imágenes térmicas en formato TIFF también serán geoetiquetadas, pero como no hay un formato oficial de geoetiquetas en el formato TIFF 6.0, las etiquetas utilizadas pueden no ser legibles por todos los programas. La información de geoetiquetas de los archivos de vídeo se almacena en un archivo SRT con la hora del día. Muchos programas de visualización de vídeo pueden ver los datos del archivo SRT como subtítulos.
Algunas cámaras FLIR UAS tienen un receptor GPS incorporado. Si ese receptor tiene bloqueo de GPS, los datos de localización serán almacenados. Si no hay un receptor GPS en la cámara, los archivos pueden seguir siendo geoetiquetados si los datos de ubicación son enviados por el vehículo a la cámara a través de MAVlink.
¿QUÉ CAUSA EL HALO O VIÑETEADO EN MIS IMÁGENES?
Las cámaras térmicas funcionan mejor cuando todos los componentes de la cámara están a la misma temperatura. En una cámara de dron, esto casi nunca es así. El calor de los componentes electrónicos y de los motores del estabilizador en el interior de la carcasa llega a un extremo de la cámara, mientras que el objetivo es enfriado por la corriente de deslizamiento de la hélice. Esto suele provocar que el borde exterior y las esquinas de la imagen aparezcan más fríos que el centro. Esta «falta de uniformidad de la imagen» suele describirse como viñeteado, halo o, si se aplica una de las paletas de colores más extremas, un «anillo púrpura». La cámara lo compensa hasta cierto punto, pero la naturaleza dinámica del problema hace que sea difícil evitar por completo el efecto.
¿CÓMO PUEDO REDUCIR LOS EFECTOS DE HALO O VIÑETEADO EN MIS IMÁGENES?
Todas las cámaras térmicas tienen cierta falta de uniformidad en la imagen. A menudo, esto adopta la forma de bordes y esquinas más fríos, lo que provoca un efecto de halo. Las paletas de colores más extremas disponibles en su cámara se crean para exagerar cualquier detalle en la imagen. Una escena de bajo contraste tiene menos detalles, por lo que los colores se aplicarán al ruido u otros artefactos. En la mayoría de los casos, es más fácil interpretar las imágenes térmicas con la paleta Black Hot, White Hot, ya que estas muestran un contraste más consistente. Además, las escenas con personas u otros objetos cálidos «estirarán» los colores, haciendo que el halo sea menos perceptible.
¿CÓMO PUEDO CONVERTIR LOS DATOS DE PÍXELES EN TEMPERATURA?
Solo los valores de píxeles de las cámaras térmicas radiométricas como la FLIR Vue Pro R o la TZ20-R pueden convertirse en valores de temperatura. Para estas cámaras, los valores de píxeles del archivo tiff ya han sido convertidos a una temperatura basada en la emisividad del objetivo, la temperatura de fondo y otros parámetros radiométricos presentes en la cámara en el momento en que se tomó la imagen. Estos valores se almacenan con un factor de escala. Para convertirlos a grados Kelvin, deben multiplicarse por 0,04 (si la cámara estaba en modo de alta ganancia) o por 0,4 (si la cámara estaba en modo de baja ganancia). La ganancia alta es el modo por defecto y la ganancia baja solo se introduce cuando las temperaturas superan los 135° C. Para convertir de Kelvin a grados centígrados, reste 273,15 al valor en Kelvin. Por ejemplo, un valor de píxel del archivo tiff de 7500 (decimal) 7500*0,04 – 273,15 es aproximadamente 27 °C.
Los archivos radiométricos R.JPEG de FLIR son más flexibles que los archivos tiff. Los archivos R.JPEG se pueden abrir con las herramientas de FLIR y los parámetros radiométricos se pueden ajustar a diferentes valores para hacer correcciones después del vuelo. Esto permite estimar valores de temperatura para diferentes objetivos con diferentes valores de emisividad, o añadir valores no conocidos en el momento del vuelo. Se pueden utilizar de forma interactiva varios medidores de puntos y áreas disponibles en FLIR Thermal Studio para analizar la imagen.
Para crear un archivo CSV con todos los valores de temperatura de los píxeles de un archivo R.JPEG, abra el archivo en FLIR Thermal Studio, realice los ajustes de parámetros radiométricos necesarios y, a continuación, exporte a través del menú el archivo a CSV. Podrá elegir crear un archivo CSV para toda la imagen o de cualquier punto o área de medición que haya creado en la imagen.
MI DISPOSITIVO MÓVIL NO SE CONECTA A LA CÁMARA. ¿QUÉ PUEDO HACER?
La aplicación FLIR UAS requiere acceso al transceptor Bluetooth de la cámara. Es posible que varios complementos y protocolos de seguridad o de ahorro de batería interfieran con esto. Se debe comprobar la configuración de la aplicación para asegurarse de que la aplicación tiene el acceso necesario. Se debe comprobar la configuración de Bluetooth para confirmar que el transceptor del smartphone está activado. Desinstalar y volver a instalar la aplicación puede restablecer los permisos correctos. Apagar el dispositivo móvil por completo y volver a encenderlo es otra cosa que puede ayudar en algunos casos.
Los transmisores fuertes, como los enlaces descendentes de vídeo, la telemetría o los mandos a distancia, pueden afectar al transceptor del teléfono, aunque no operen en la misma banda. Probar con diferentes ubicaciones para el smartphone puede ayudar. Si se realiza con seguridad, apagar los transmisores innecesarios puede ayudar a resolver los problemas.
Por último, las cámaras FLIR UAS apagan sus transceptores Bluetooth si no hay actividad Bluetooth durante varios minutos. El LED de Bluetooth se iluminará en azul cuando esté activado. Para reactivarlo, pulse el botón de Bluetooth de la cámara hasta que el LED se vuelva a poner azul.
¿PUEDO CAMBIAR EL OBJETIVO DE MI CÁMARA TÉRMICA?
No es recomendable y anulará la garantía de la cámara. Al quitar el objetivo de una cámara térmica, la ventana del detector queda expuesta al polvo y a otros contaminantes del aire y a los residuos de las roscas del objetivo. Cualquier partícula de polvo en esta ventana creará un defecto en la imagen. Los revestimientos de la ventana son demasiado delicados para ser limpiados.
¿POR QUÉ LA IMAGEN PARECE «CONGELARSE» A VECES ANTES DE VOLVER AL FUNCIONAMIENTO NORMAL?
Las cámaras IR realizan una corrección no uniforme (NUC) antes de ajustar el nivel y el intervalo. Esto corrige automáticamente la pequeña desviación del detector que se produce a medida que la escena y el entorno cambian. La cámara también realizará esta operación por sí misma de vez en cuando. Piense en esto como un ajuste de todos los píxeles a un punto de referencia base.
Para cualquier duda o consulta, contacta con nosotros.
Software (3)
Para obtener una licencia de inicio de Thermal Studio siga estos pasos:
- Vaya a FLIR.com e inicie sesión/regístrese.
- Haga clic en el icono de la lupa y busque Thermal Studio Suite.
- En la página del producto y haga clic en «Seleccionar y comparar planes».
- Elija la opción Thermal Studio Starter.
- Rellene la información solicitada.
- Haga clic en «Enviar».
- Recibirá un correo electrónico con la licencia y el enlace de descarga en los próximos 20 minutos.
Si tiene problemas para recibir la licencia, no dude en ponerse en contacto con el equipo de asistencia técnica creando una incidencia aquí.
Para cualquier duda o consulta, contacta con nosotros.
Nota: Los valores de la versión de software que aparecen a continuación son ejemplos, los valores reales de la última versión de software pueden ser mayores. Ejemplo: FLIR T5xx y T840 Update Pack 6.19.67 o superior.
Paso 1: Vaya a la página de inicio del Centro de Soporte Técnico de FLIR https://support.flir.com
Paso 2: Haga clic en Software y SDKs en la parte inferior central de la pantalla.

Paso 3: Una vez que llegue a la página del software, utilice las flechas desplegables para seleccionar el tipo de firmware / software de la cámara.

Paso 4: Haga clic en el firmware / software de la cámara.

Paso 5: Haga clic en «Haga clic para descargar como ZIP» y la carpeta se descargará en la carpeta predeterminada de su ordenador (normalmente la carpeta «Download»).

Paso 6: Descomprima la carpeta y siga las instrucciones del archivo PDF para actualizar su cámara.
Para cualquier duda o consulta, contacta con nosotros.
Para activar FLIR Thermal Studio Pro (clave de licencia perpetua) off-line, siga estos pasos:
1) Vaya a https://support.flir.com/thermalstudio
2) Haga clic en «Link» junto a «Offline activation, FLIR Thermal Studio»
3) Elija el idioma preferido
4) Introduzca el nombre, el correo electrónico, la clave de licencia (número de serie) y el código de la máquina. El Código de Máquina es generado por FLIR Thermal Studio en la pestaña de Activación Offline.
5) Haga clic en «Request activation code» y copie el código de activación que aparece.
6) Inserte el código de activación en el cuadro de texto «Código de activación» en FLIR Thermal Studio.
7) Recuerde insertar sus datos (incluyendo la clave de licencia).
8) Haga clic en «Validar».
El código de activación debe estar en minúsculas, no en mayúsculas (como el código de la máquina) y es mucho más largo que el código de la máquina.
Nota: Las claves de licencia de suscripción de FLIR Thermal Studio Pro no pueden activarse off-line . Solo las claves de licencia perpetua pueden ser activadas off-line.
Para cualquier duda o consulta, contacta con nosotros.
Tecnología Infrarroja (4)
¿Qué es el sonido de «clic»?
El sonido de clic es normal en las cámaras basadas en microbolómetros. Es el resultado de la corrección de no uniformidad de la cámara, o NUC. Lo que realmente se oye es el obturador interno de la cámara moviéndose delante del detector durante un breve instante.
Esto ocurre regularmente en las cámaras de infrarrojos no refrigeradas, pero también ocurre ocasionalmente en los modelos de infrarrojos refrigerados.
También se conoce como FFC, que significa corrección de campo plano. El obturador es una fuente plana para que el detector se calibre a sí mismo para dar una respuesta uniforme.
¿Qué hace un NUC?
La corrección de no uniformidad (NUC) ajusta la pequeña desviación del detector que se produce al cambiar la escena y el entorno. Básicamente, el propio calor de la cámara puede interferir en las lecturas de temperatura. Para mejorar la precisión, la cámara mide la radiación IR de su propia óptica y luego ajusta la imagen en función de esas lecturas.
La cámara suele congelar el flujo de imágenes cuando esto ocurre. De lo contrario, se vería una imagen completamente plana.
¿Qué pasa sin el NUC?
Como se mencionó anteriormente, el NUC es útil para mejorar las lecturas de temperatura. Sin el NUC, se corre el riesgo de obtener lecturas de temperatura inestables. El NUC no se puede desactivar en la mayoría de las cámaras portátiles.
Sin embargo, en la mayoría de las unidades de automatización y de ciencia, el NUC puede ajustarse del modo automático al manual. Esto le permitirá controlar exactamente cuándo la cámara realiza un NUC, ya sea a través de señales de software o de hardware.
Tras el arranque inicial, la cámara realizará NUC con frecuencia. La imagen puede congelarse momentáneamente y puede oírse un «clic». A medida que la cámara se calienta y alcanza una temperatura de funcionamiento estable, los NUC serán menos frecuentes.
Para cualquier duda o consulta, contacta con nosotros.
Tenemos una utilidad llamada calculadora de FoV que está disponible en este sitio, acceda a ella siguiendo el procedimiento siguiente:
- Vaya a Download Datasheet y seleccione una serie de cámaras
- Haga clic en el hipervínculo FoV Calc. Para una combinación de cámara y lente. Esto muestra la calculadora FoV.
- Para seleccionar una combinación diferente de cámara y objetivo para una cámara concreta, seleccione la nueva combinación en el menú desplegable.
La calculadora de FoV muestra los siguientes resultados:
- HFOV: campo de visión horizontal en metros y pies.
- VFOV: campo de visión vertical en metros y pies.
- Profundidad de campo-límite lejano en metros y pies.
- Profundidad de campo-límite cercano en metros y pies.
- IFOV: campo de visión instantáneo en milímetros y pulgadas.
- Distancia al objetivo en metros y pies.
Consejos:
- Cada cámara puede tener objetivos intercambiables. En este caso, puede elegir un objetivo en el menú desplegable.
- Puede cambiar entre unidades métricas o imperiales utilizando el menú desplegable
- introduzca varias distancias separadas por comas para calcular el FoV a todas las distancias deseadas
Ejemplo de un A655sc 45°
Vaya a las fichas técnicas de las cámaras y seleccione el producto:

Seleccione la lente de 45° en el menú desplegable:

Introduzca la distancia deseada para calcular el FoV. O bien, utilice los valores por defecto.

Para cualquier duda o consulta, contacta con nosotros.
El formato de archivo de imágenes radiométricas JPEG tiene datos de temperatura incrustados en cada píxel y puede analizarse con software de informes e I+D como FLIR Thermal Studio y FLIR Research Studio.
FLIR Thermal Studio y FLIR Research Studio pueden utilizarse para ver imágenes combinadas de infrarrojos, visibles y MSX, así como para ajustar térmicamente las imágenes para obtener los detalles que necesita.
Para cualquier duda o consulta, contacta con nosotros.
Este código de abajo permite a los usuarios capturar marcos de bosones crudos usando opencv en windows y linux. Esto funcionará en cualquier lenguaje que tenga enlaces opencv. Esto ha sido probado en c# (emgucv) y python (opencv-python). Aquí hay un ejemplo en python. En otros lenguajes, configurando las mismas propiedades obtendrás raw de 16 bits. La principal diferencia entre windows y linux es que hay que forzar el backend DirectShow en windows.
Requisito (desde el terminal/comando) pip install opencv-python.
En Windows

En Linux

Para cualquier duda o consulta, contacta con nosotros.